Click image to open full size
Microcontrollers in Robots
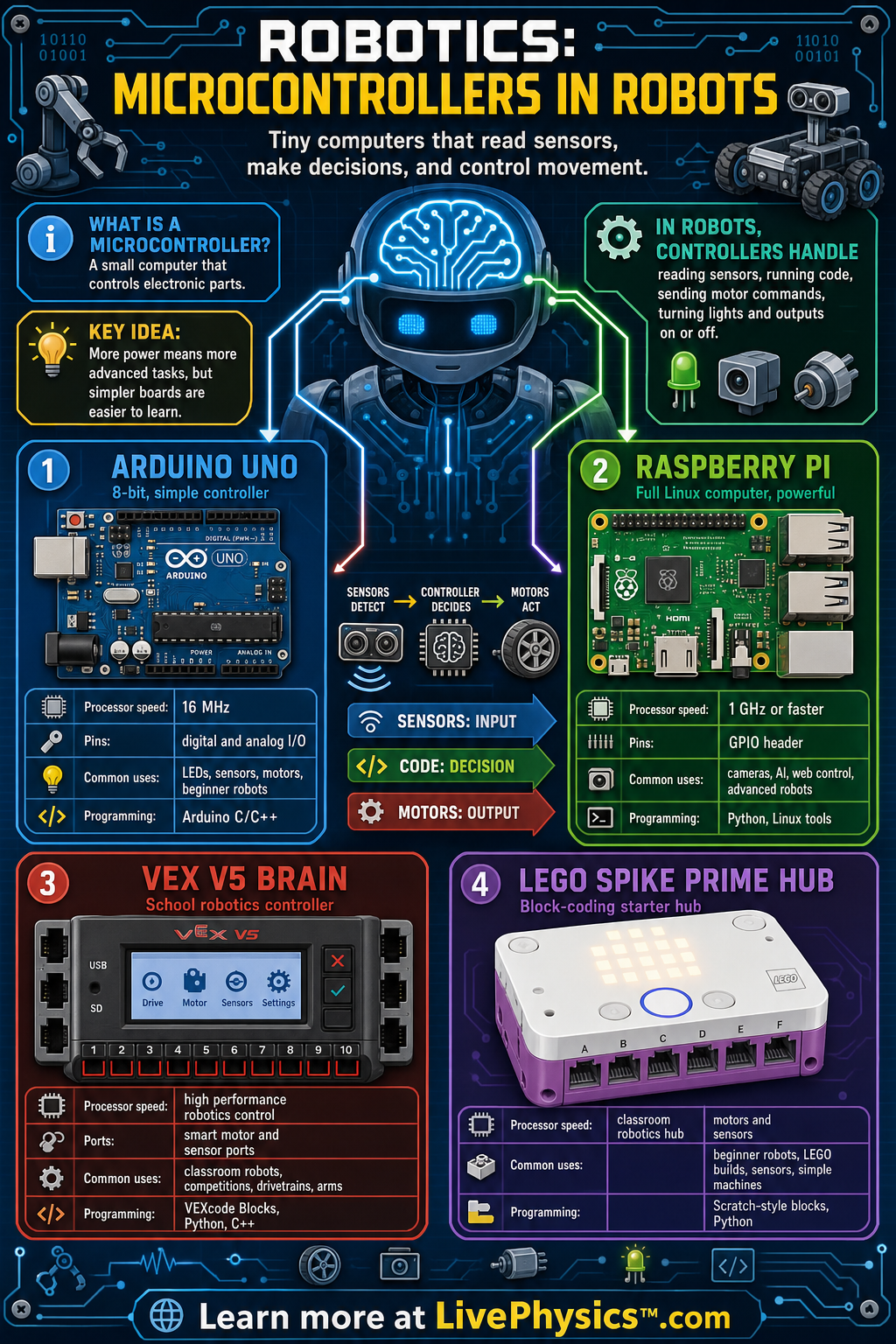
Arduino, Raspberry Pi, VEX, and LEGO brains compared
Related Tools
A robot needs more than motors, wheels, and sensors to act on its own. It needs a controller, which works like the robot brain by reading inputs, making decisions, and sending commands to outputs. In school robotics, this controller is often a microcontroller board or a small computer board. Understanding the controller helps students design robots that sense, think, and move in useful ways.
Microcontrollers use programs to turn sensor data into actions, such as stopping when an object is close or turning toward a line on the floor. Boards such as Arduino Uno, Raspberry Pi, VEX V5 Brain, and LEGO SPIKE Prime Hub are common because they connect easily to motors, sensors, and lights. Each board has different strengths, including speed, programming style, number of pins, and ease of use. Choosing the right controller depends on the robot task, the hardware being connected, and the programming skills of the team.
Key Facts
- Controller job: input from sensors + program logic = output commands to motors, lights, and displays.
- Arduino Uno uses an 8-bit microcontroller and is popular for simple sensor and motor projects.
- Raspberry Pi is a small Linux computer, so it can handle cameras, networking, and more complex programs.
- VEX V5 Brain is designed for school competition robots and connects directly to VEX motors, sensors, and controllers.
- LEGO SPIKE Prime Hub supports beginner-friendly block coding and connects to LEGO motors and sensors.
- Digital pins usually read or send two states: HIGH or LOW, often represented as 1 or 0.
Vocabulary
- Microcontroller
- A small programmable chip that reads inputs, follows instructions, and controls outputs in a device.
- Input
- Information a robot receives from sensors, buttons, cameras, or other devices.
- Output
- An action or signal sent by the controller to parts such as motors, LEDs, buzzers, or displays.
- Pin
- A connection point on a controller board used to send or receive electrical signals.
- Processor speed
- A measure of how many cycles a controller's processor can run each second, often given in megahertz or gigahertz.
Common Mistakes to Avoid
- Calling every controller a microcontroller is incorrect because a Raspberry Pi is a full computer that runs an operating system, while an Arduino Uno is a microcontroller board.
- Connecting motors directly to weak signal pins is wrong because many pins cannot supply enough current and may be damaged without a motor driver or proper motor port.
- Ignoring voltage limits is dangerous because using the wrong voltage can reset the board, damage sensors, or burn out electronic parts.
- Choosing the most powerful board for every robot is a poor design habit because simple tasks often work better with a cheaper, easier, and lower-power controller.
Practice Questions
- 1 An Arduino Uno reads a distance sensor 20 times each second. How many sensor readings does it take in 3 minutes?
- 2 A robot has 4 motors, 3 touch sensors, and 2 LEDs. If each device needs one controller port, how many ports are needed in total?
- 3 A team wants to build a line-following robot for beginners using block coding, while another team wants a camera robot that can recognize objects. Which controller from Arduino Uno, Raspberry Pi, VEX V5 Brain, and LEGO SPIKE Prime Hub fits each project best, and why?