Mobile robot drivetrains are the systems that let a robot move, turn, push, and control its path. This cheat sheet helps students compare common drivetrains such as differential drive, tank drive, mecanum drive, and swerve drive. It also connects drivetrain choices to speed, torque, traction, and maneuverability.
These ideas are useful for robotics competitions, classroom builds, and engineering design decisions.
The most important drivetrain formulas connect wheel radius, wheel speed, robot speed, gear ratio, and force. A larger wheel or faster motor can increase speed, but gearing and traction limit what the robot can actually do. Turning depends on how wheel speeds differ on each side of the robot or how individual wheel modules are aimed.
Good drivetrain design balances speed, pushing force, control accuracy, weight, and mechanical complexity.
Key Facts
- Robot speed for a driven wheel is v = 2 pi r n, where r is wheel radius and n is wheel rotations per second.
- Gear ratio can be written as gear ratio = driven gear teeth / driving gear teeth.
- Output speed is output rpm = motor rpm / gear ratio when the gear ratio is greater than 1 for reduction.
- Output torque is output torque = motor torque x gear ratio x efficiency.
- Wheel pushing force is approximately F = torque at wheel / wheel radius.
- Maximum traction force is Fmax = coefficient of friction x normal force, so wheels slip if pushing force is greater than traction.
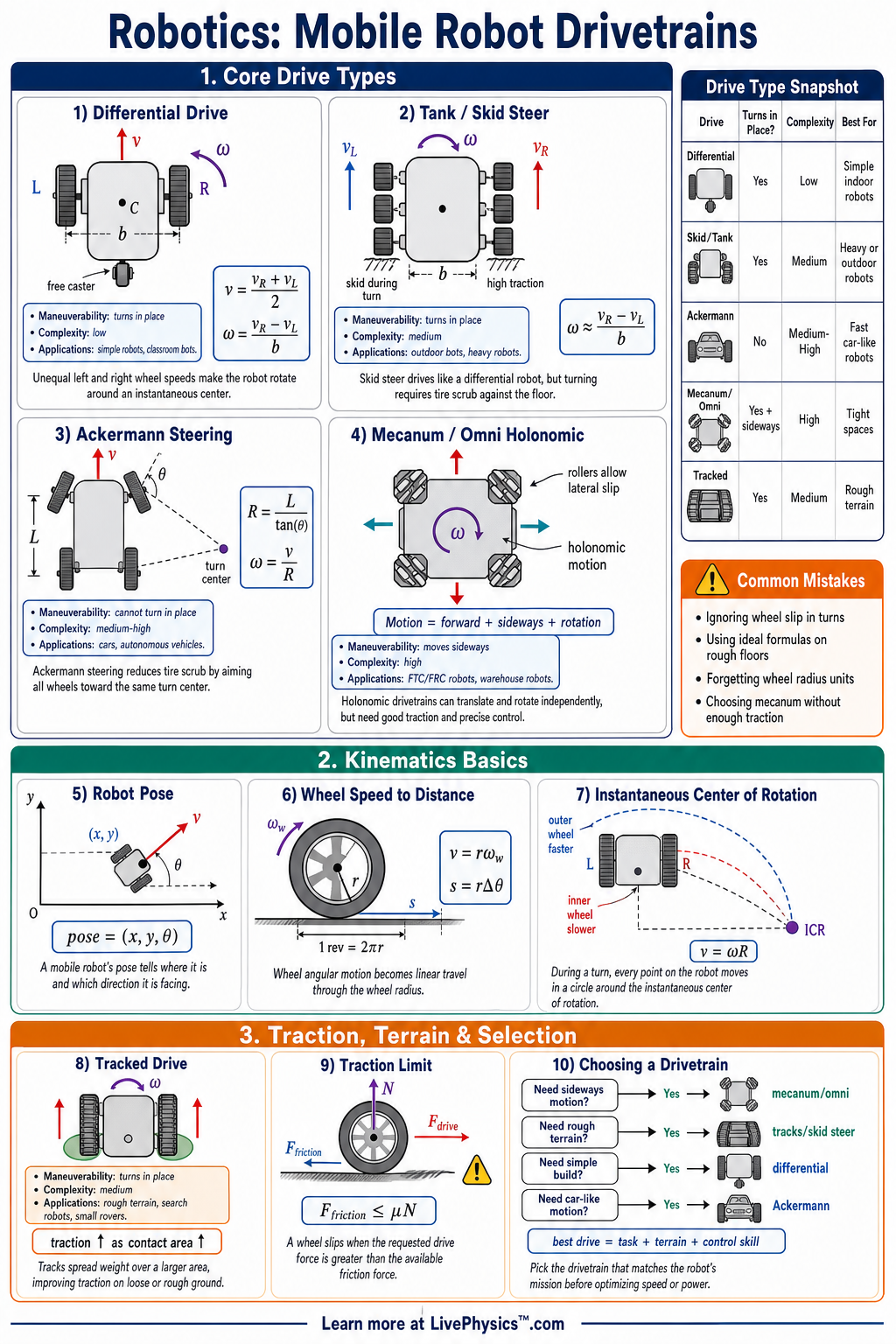
- For a differential drive robot, forward speed is v = (vR + vL) / 2 and turning rate is omega = (vR - vL) / track width.
- A smaller turning radius comes from a larger difference between left and right wheel speeds or a smaller track width.
Vocabulary
- Drivetrain
- The set of motors, gears, wheels, belts, chains, and structure that moves a robot across the ground.
- Differential Drive
- A drivetrain that turns by driving the left and right sides at different speeds.
- Gear Ratio
- A comparison of input rotation to output rotation that trades speed for torque or torque for speed.
- Torque
- A twisting force that helps a wheel start moving, climb, accelerate, or push against another object.
- Traction
- The grip between the wheels and the floor that limits how much force the robot can apply without slipping.
- Mecanum Drive
- A drivetrain using angled rollers on wheels so the robot can move forward, sideways, and diagonally.
Common Mistakes to Avoid
- Confusing speed and torque is wrong because gearing that increases torque usually reduces output speed. A robot geared only for top speed may accelerate slowly or fail to push effectively.
- Ignoring traction is wrong because a motor can produce more wheel force than the floor can support. Extra torque does not help if the wheels are already slipping.
- Using wheel diameter instead of radius in v = 2 pi r n is wrong because the formula needs the radius. Using diameter doubles the calculated robot speed.
- Assuming mecanum and swerve drives are always better is wrong because they add cost, weight, programming difficulty, and possible efficiency losses. The best drivetrain depends on the task.
- Forgetting track width in turning calculations is wrong because the same wheel speed difference turns wide robots more slowly than narrow robots. Robot geometry affects turning rate.
Practice Questions
- 1 A robot wheel has radius 0.05 m and spins at 8 rotations per second. Using v = 2 pi r n, what is the robot speed in meters per second?
- 2 A motor spins at 6000 rpm and drives a wheel through a 12:1 gear reduction. What is the wheel rpm?
- 3 A wheel receives 3 N m of torque and has radius 0.06 m. Using F = torque / radius, what pushing force can that wheel apply before traction limits are considered?
- 4 A competition robot needs to move through tight spaces, line up precisely, and push game pieces. Explain which drivetrain features would matter most and why.